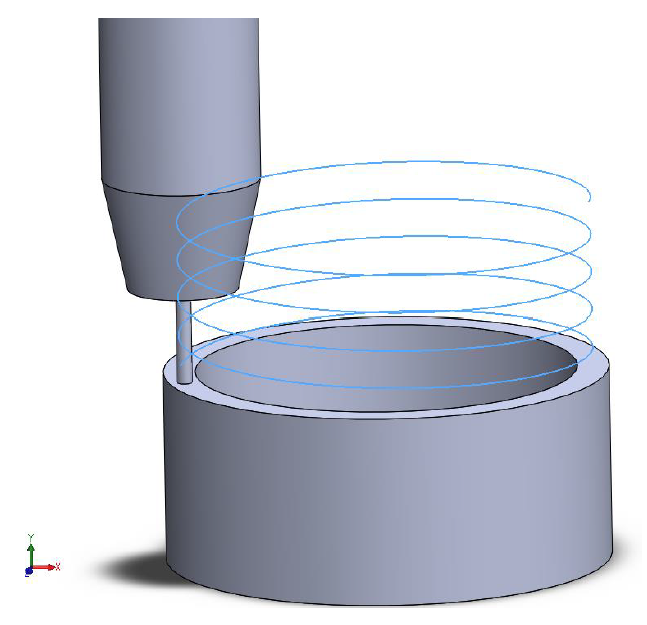
Process-integrated self-regulation of the Wire and Arc Additive Manufacturing (WAAM) process to produce graded designed materials
| Year: | 2020 |
| Funding: | Nds. Ministerium für Wissenschaft u. Kultur |
| Duration: | Förderung seit 2020 |
| Is Finished: | yes |
| Supervisor: | Prof. Dr.-Ing. Hans Jürgen Maier |
| Co-Supervisor: | Dr.-Ing. Thomas Hassel |
| Projekt ID: | 11 |
| Location: | Leibniz Universität Hannover, Institut für Werkstoffkunde (IW) |
Motivation
How can the WAAM printer learn the height offset from its own process data in order to generate fully automatic three-dimensional graded designed components? In the future, a process-dependent variable for working in the third dimension can be extracted from the arc process itself. The self-regulating process becomes intelligent! The traditional approach of slicing can be transferred by the development of a point-to-point control to the robot based WAAM technology in kind of a self-controlled process to vary the possibilities to produce specially designed materials.
Objectives
Currently, the biggest obstacle in WAAM technology is the lack of material independence in process control. Consequently, the user cannot carry out a quick material change without the information on the material-dependent process parameters and height offset. Hence, there is still a considerable trial-and-error effort needed to fill databases with empirically obtained data. The objectives of this project can drastically reduce the effort of empirical data determination for the different materials (e.g. steels, Al, Cu alloys, etc.) and its properties. It will also account for varying wire diameters, gas compositions, and thus, make the WAAM process significantly more economical and variable. In essence, the machine will learn to control itself, which gains intelligence with respect to the materials application range. This in turn, will make the development of the robot-based WAAM considerably easier. Specifically, the intermediate step of "slicing" will be become obsolete such that the robot code is generated directly from the CAD data file, and the component is assembled using path planning guided by the change of the arc information. This offers a huge field to development graded designed materials with WAAM.
Download further project information



















